HSM Architecture
Hierarchical States
Let’s talk about SMACC support for hierarchical states…
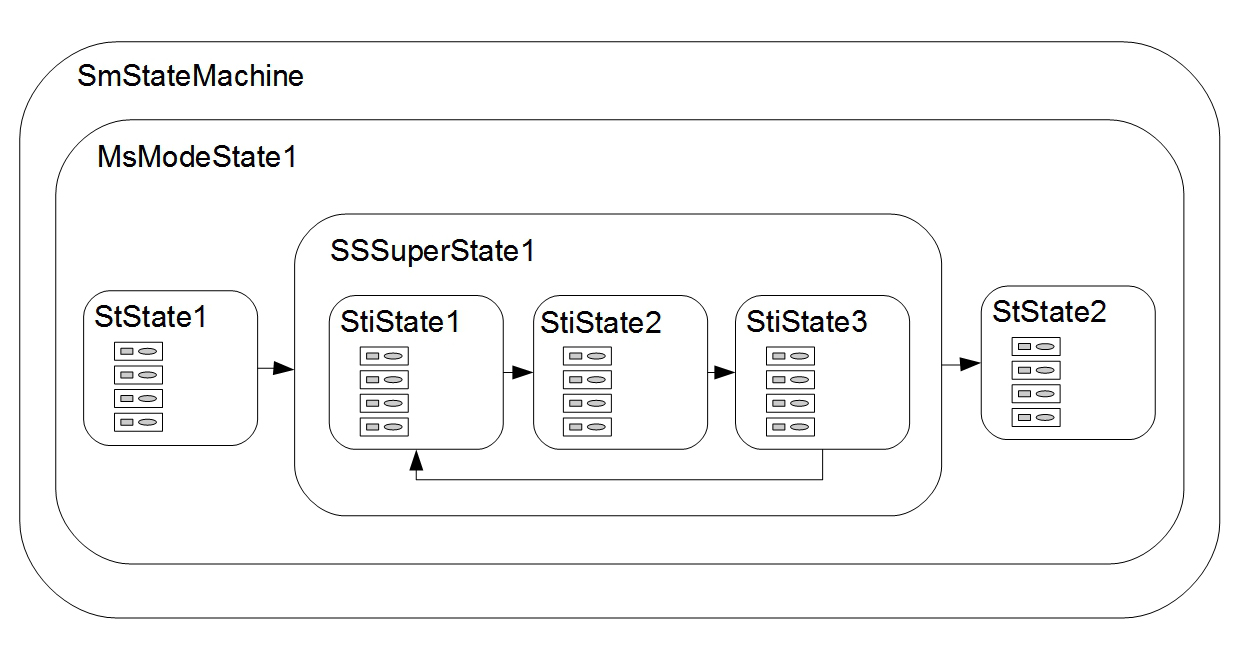
We need to make a distinction between parent states & leaf states. Leaf states being defined as those states that do not have any child states. In the example above, StState1, StState2, StiState1, StiState2 and StiState3 are leaf states.
The higher-level parent states — superstates and mode states — are collectively referred to as container states. Container states define sequences, loops, operational phases, and parameter changes. Leaf states are typically where hardware-interface behaviors live, but container states can also own client behaviors and state reactors when those objects need to persist across inner state transitions. See Substate Architecture for details on the container state patterns.
SMACC2 provides three levels of hierarchy above leaf states:
Mode States (Ms) – top-level groupings that represent operational phases of the state machine (e.g.,
MsRun,MsRecover,MsInFlight).Super States (Ss) – mid-level groupings that define repeatable sequences or sub-phases within a mode state.
Inner States (Sti) – leaf states that live inside a super state and participate in loops and sequences.
The sections below explain each level in detail.
Mode States
A mode state is the highest level of hierarchy inside a state machine. It groups related states into a named operational phase and specifies which child state to enter first.
Template signature:
struct MsRun : smacc2::SmaccState<MsRun, SmThreeSome, StState1>
The three template parameters are:
The mode state itself (
MsRun)The parent – always the state machine (
SmThreeSome)The initial child state (
StState1) – the state entered when the mode state is activated
Example – sm_three_some: MsRun and MsRecover
sm_three_some uses two mode states to separate normal execution from error recovery:
// ms_run.hpp -- normal execution mode
class MsRun : public smacc2::SmaccState<MsRun, SmThreeSome, StState1>
{
public:
using SmaccState::SmaccState;
};
// ms_recover.hpp -- recovery mode
class MsRecover : public smacc2::SmaccState<MsRecover, SmThreeSome>
{
public:
using SmaccState::SmaccState;
typedef mpl::list<
Transition<EvToDeep, smacc2::deep_history<typename MsRun::LastDeepState>, SUCCESS>
>reactions;
};
The state machine itself declares MsRun as its initial state:
struct SmThreeSome : public smacc2::SmaccStateMachineBase<SmThreeSome, MsRun>
{
using SmaccStateMachineBase::SmaccStateMachineBase;
void onInitialize() override
{
this->createOrthogonal<OrTimer>();
this->createOrthogonal<OrKeyboard>();
this->createOrthogonal<OrSubscriber>();
}
};
Example – sm_cl_px4_mr_test_1: Flight phases as mode states
A PX4 multirotor mission uses six mode states to represent distinct flight phases:
// State machine with MsDisarmedOnGround as initial mode state
struct SmClPx4MrTest1
: public smacc2::SmaccStateMachineBase<SmClPx4MrTest1, MsDisarmedOnGround>
{ ... };
// Each flight phase is a mode state with its own initial child
struct MsDisarmedOnGround
: smacc2::SmaccState<MsDisarmedOnGround, SmClPx4MrTest1, StWaitForReady> { ... };
struct MsArmedOnGround
: smacc2::SmaccState<MsArmedOnGround, SmClPx4MrTest1, StArmPx4> { ... };
struct MsTakeoff
: smacc2::SmaccState<MsTakeoff, SmClPx4MrTest1, StTakeoff> { ... };
struct MsInFlight
: smacc2::SmaccState<MsInFlight, SmClPx4MrTest1, StGoToWaypoint1> { ... };
struct MsLanding
: smacc2::SmaccState<MsLanding, SmClPx4MrTest1, StLand> { ... };
struct MsLanded
: smacc2::SmaccState<MsLanded, SmClPx4MrTest1, StLanded> { ... };
Mode-to-mode transitions are triggered by leaf states posting events that bubble up to the mode state level. For example, when StWaitForReady posts a timer event, the transition table at the mode state or leaf state level catches it and transitions to MsArmedOnGround.
Super States
Super states group a set of inner states into a reusable, namespaced unit inside a mode state. They are the mechanism for defining sequences, loops, and sub-phases within a mode.
Namespace isolation pattern:
Super states use a namespace to isolate their inner state forward declarations from other super states that may have identically named inner states (e.g., both SS1 and SS2 can each contain an StiState1):
// In sm_three_some.hpp -- forward declarations
namespace SS1 { class Ss1; }
namespace SS2 { class Ss2; }
Super state definition:
// ss_superstate_1.hpp
namespace sm_three_some
{
namespace SS1
{
namespace sm_three_some { namespace inner_states {
class StiState1;
class StiState2;
class StiState3;
}}
using namespace sm_three_some::inner_states;
struct Ss1 : smacc2::SmaccState<Ss1, MsRun, StiState1>
{
public:
using SmaccState::SmaccState;
// TRANSITION TABLE
typedef mpl::list<
Transition<EvLoopEnd<StiState1>, SS2::Ss2>
>reactions;
// STATE VARIABLES
static constexpr int total_iterations() { return 5; }
int iteration_count = 0;
};
using SS = SS1::Ss1;
#include <sm_three_some/states/inner_states/sti_state_1.hpp>
#include <sm_three_some/states/inner_states/sti_state_2.hpp>
#include <sm_three_some/states/inner_states/sti_state_3.hpp>
} // namespace SS1
} // namespace sm_three_some
Key points:
SmaccState<Ss1, MsRun, StiState1>– the parent is the mode stateMsRun, and the initial child isStiState1.iteration_countandtotal_iterations()are member variables on the super state that survive inner state transitions (see State-Local Storage below).The
using SS = SS1::Ss1alias lets inner states refer to their parent generically, enabling the same inner state code to be reused across multiple super states.When the loop ends (
EvLoopEnd<StiState1>), the super state transitions to the next super state (SS2::Ss2) or back to a regular state.
Inner States and Loops
Inner states (prefix Sti) are leaf states that live inside a super state. They form the steps of a sequence or loop.
Loop mechanism:
SMACC2 provides built-in loop support through three elements:
loopWhileCondition()– a method on an inner state that returnstrueto continue looping orfalseto end.checkWhileLoopConditionAndThrowEvent()– called inonEntry()to evaluate the condition and post the appropriate event.EvLoopContinue/EvLoopEnd– the events posted based on the condition.
Example – StiState1 as a loop gate:
// sti_state_1.hpp
struct StiState1 : smacc2::SmaccState<StiState1, SS>
{
public:
using SmaccState::SmaccState;
typedef mpl::list<
Transition<EvLoopContinue<StiState1>, StiState2, CONTINUELOOP>
>reactions;
static void staticConfigure() {}
void runtimeConfigure() {}
bool loopWhileCondition()
{
auto & superstate = this->context<SS>();
RCLCPP_INFO(
getLogger(), "Loop start, current iterations: %d, total iterations: %d",
superstate.iteration_count, superstate.total_iterations());
return superstate.iteration_count++ < superstate.total_iterations();
}
void onEntry()
{
RCLCPP_INFO(getLogger(), "LOOP START ON ENTRY");
checkWhileLoopConditionAndThrowEvent(&StiState1::loopWhileCondition);
}
};
How the loop works:
StiState1is entered (it is the initial child of the super state).onEntry()callscheckWhileLoopConditionAndThrowEvent(), which callsloopWhileCondition().If
iteration_count < total_iterations(),EvLoopContinue<StiState1>is posted, transitioning toStiState2.StiState2does its work, transitions toStiState3, which transitions back toStiState1.On the next entry of
StiState1, the iteration count is checked again. When the limit is reached,EvLoopEnd<StiState1>is posted.The super state’s transition table catches
EvLoopEndand transitions to the next super state or state.
The this->context<SS>() call accesses the parent super state, allowing inner states to read and write the super state’s member variables – this is how the iteration counter is shared across inner state transitions.
Deep History
Deep history is a mechanism that allows a mode state to remember the exact nested state hierarchy it was in when it was exited, and restore that hierarchy when re-entered.
In SMACC2, deep history is accessed through ModeState::LastDeepState:
// ms_recover.hpp
class MsRecover : public smacc2::SmaccState<MsRecover, SmThreeSome>
{
public:
using SmaccState::SmaccState;
typedef mpl::list<
Transition<EvToDeep, smacc2::deep_history<typename MsRun::LastDeepState>, SUCCESS>
>reactions;
};
How it works:
The state machine is in
MsRun, deep inside a nested hierarchy – for example,MsRun > SS1::Ss1 > StiState2.An error event (
EvFail) triggers a transition toMsRecover.MsRunis exited (along with all its nested states), but SMACC2 records the deepest active state asMsRun::LastDeepState.Inside
MsRecover, recovery logic runs (a recovery sequence, operator intervention, etc.).When recovery is complete,
EvToDeepis posted.The transition target
smacc2::deep_history<typename MsRun::LastDeepState>tells SMACC2 to re-enterMsRunand restore the full nested hierarchy, returning toStiState2insideSS1::Ss1.
Use case – recovery modes:
Deep history is essential for fault recovery in autonomous systems. Instead of restarting a mission from the beginning after a recoverable error, the state machine can:
Exit to a recovery mode state
Perform corrective actions (re-arm, re-calibrate, wait for operator input)
Resume exactly where it left off
This pattern is used extensively in sm_multi_stage_1, which has dedicated MsRecovery1 and MsRecovery2 mode states that use deep history to return to the last active state inside the operational modes.
State-Local Storage
In SMACC2, leaf states and their client behaviors are destroyed on every state transition. This makes them unsuitable for storing data that must persist across multiple steps in a sequence. Mode states and super states solve this problem – they survive inner state transitions and can hold member variables that inner states access through this->context<>().
Super state as data holder:
struct Ss1 : smacc2::SmaccState<Ss1, MsRun, StiState1>
{
// These survive across StiState1 → StiState2 → StiState3 transitions
static constexpr int total_iterations() { return 5; }
int iteration_count = 0;
};
Accessing parent state data from a child:
// Inside any inner state of Ss1
void onEntry()
{
auto & superstate = this->context<SS>();
int current = superstate.iteration_count;
// Read or write any member variable on the super state
superstate.iteration_count++;
}
Mode state as data holder:
The same pattern works at the mode state level. A mode state can store data that persists across all its child states, super states, and inner states:
struct MsInFlight
: smacc2::SmaccState<MsInFlight, SmClPx4MrTest1, StGoToWaypoint1>
{
using SmaccState::SmaccState;
// Data accessible to all child states via this->context<MsInFlight>()
int waypoints_completed = 0;
float total_distance_flown = 0.0f;
};
// Inside a child state
void onEntry()
{
auto & flight = this->context<MsInFlight>();
flight.waypoints_completed++;
}
Contrast with state-scoped data:
State member variables – destroyed on every state transition. Use for state-specific configuration and temporary data.
Client behavior member variables – destroyed on every state transition. Use for behavior-specific runtime state.
Super state member variables – survive inner state transitions within the super state. Use for loop counters, accumulated results, and sequence-level data.
Mode state member variables – survive all state transitions within the mode. Use for phase-level data like mission progress.
Component member variables – survive for the entire state machine lifetime. Use for persistent sensor data, connection state, and hardware interfaces.